Research into computer vision is driven by a controls perspective.
Projects include vision-based closed-loop control, estimation and
filtering of computer vision algorithms, and computer vision for
decision making and knowledge generation. Some research explores the
role of statistical machine learning in computer vision.
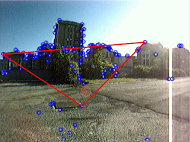
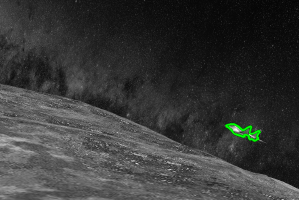 Active Vision:
Active Vision:
- vision in the feedback loop.
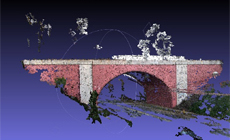 As-Built Modeling:
As-Built Modeling:
- using vision to understand the built world.
 Biomechanics:
Biomechanics:
- tracking the kinematics of people and animals.
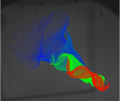
 Gait Analysis:
Gait Analysis:
- analyzing movement to aid rehabilitation.
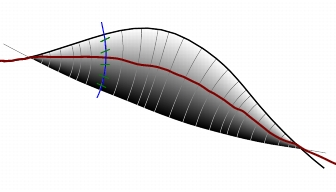 Observe:
Observe:
- estimation theory and contour-based tracking.
 Surveillance:
Surveillance:
- systems for understanding work processes and social interactions.
 Visual SLAM:
Visual SLAM:
- observability theory meets localization and mapping.
 Visual Tracking:
Visual Tracking:
- statistical machine learning and tracking.
- top -
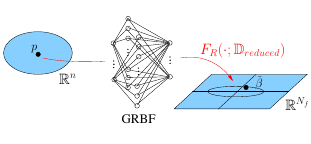
Recent research has revolved around neuro-adaptive control and how the
theory behind single-layer neural networks used in adaptive control
could be improved by insights or techniques from the machine learning
community. Older research was on geometric nonlinear control theory.
the work sought to connect averaging theory to control-oriented series
expensions for the purpose of controling underactuated systems.
 Neuro-Adaptive Control:
Neuro-Adaptive Control:
- online learning in a controls setting.
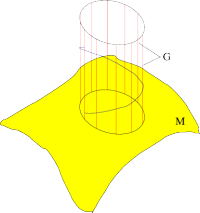 Geometric Control Theory:
Geometric Control Theory:
- where differential geometry meets nonlinear control theory.
- top -
Research on the design of control strategies for biologically-inspired
robotic systems. We know how to engineer them, but do we really know how
to control them? Considers both the practical aspects of
biologically-inspired robotics and the theoretical aspect, with the
intent to unite these two facets for the purpose of engineering
autonomous robots.
 Feedback Control of Gaits:
Feedback Control of Gaits:
- using gaits and geometric control for closed-loop motion.
 Optimal Trajectory Gait Synthesis:
Optimal Trajectory Gait Synthesis:
- using gait dynamics to snythesize gait-optimal trajectories.
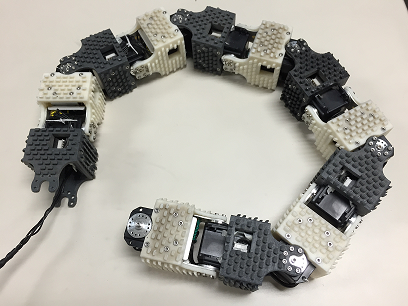 Robotic Snakes:
Robotic Snakes:
- design, dynamics, and control of robotic snakes.
- top -

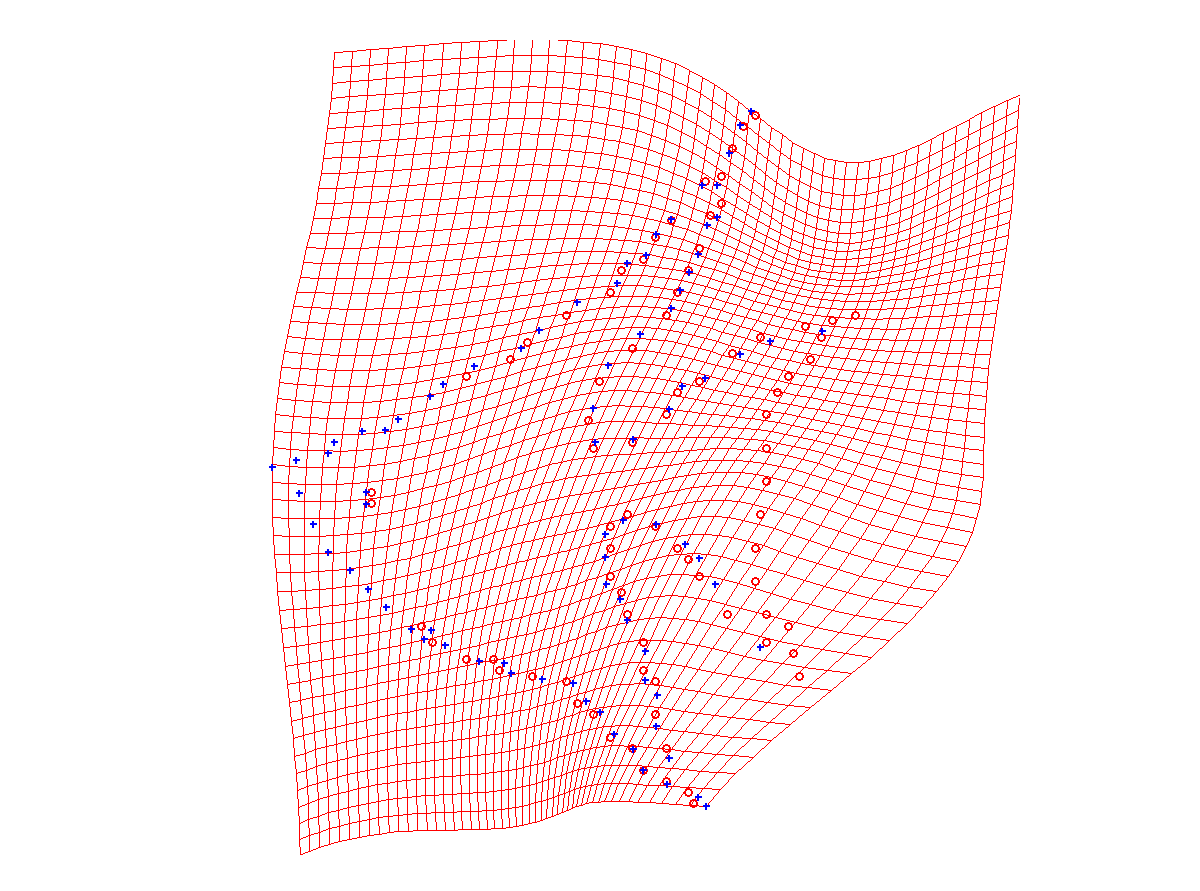 Non-rigid registration:
Non-rigid registration: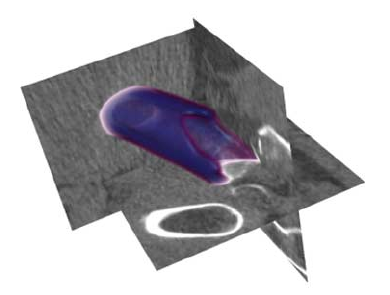 Interactive Segmentation:
Interactive Segmentation: Robot Planning:
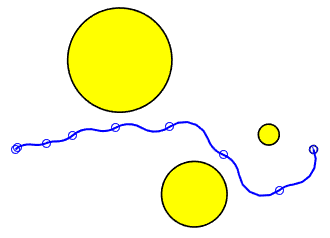
Robot Planning: Root-Locus Path Generation:
Root-Locus Path Generation: